13. Juli '17

Ein kleines selbstgebautes Roboterfahrzeug der Hochschule Coburg steht auf einem Teppichboden und zeigt eine Platine mit verschiedenen elektronischen Komponenten und Sensoren. Es verfügt über einen digitalen Bildschirm mit Textanzeige und ist mit einer kleinen roten Flagge geschmückt, die an der Platine befestigt ist.
Ein kleines selbstgebautes Roboterfahrzeug der Hochschule Coburg steht auf einem Teppichboden und zeigt eine Platine mit verschiedenen elektronischen Komponenten und Sensoren. Es verfügt über einen digitalen Bildschirm mit Textanzeige und ist mit einer kleinen roten Flagge geschmückt, die an der Platine befestigt ist.
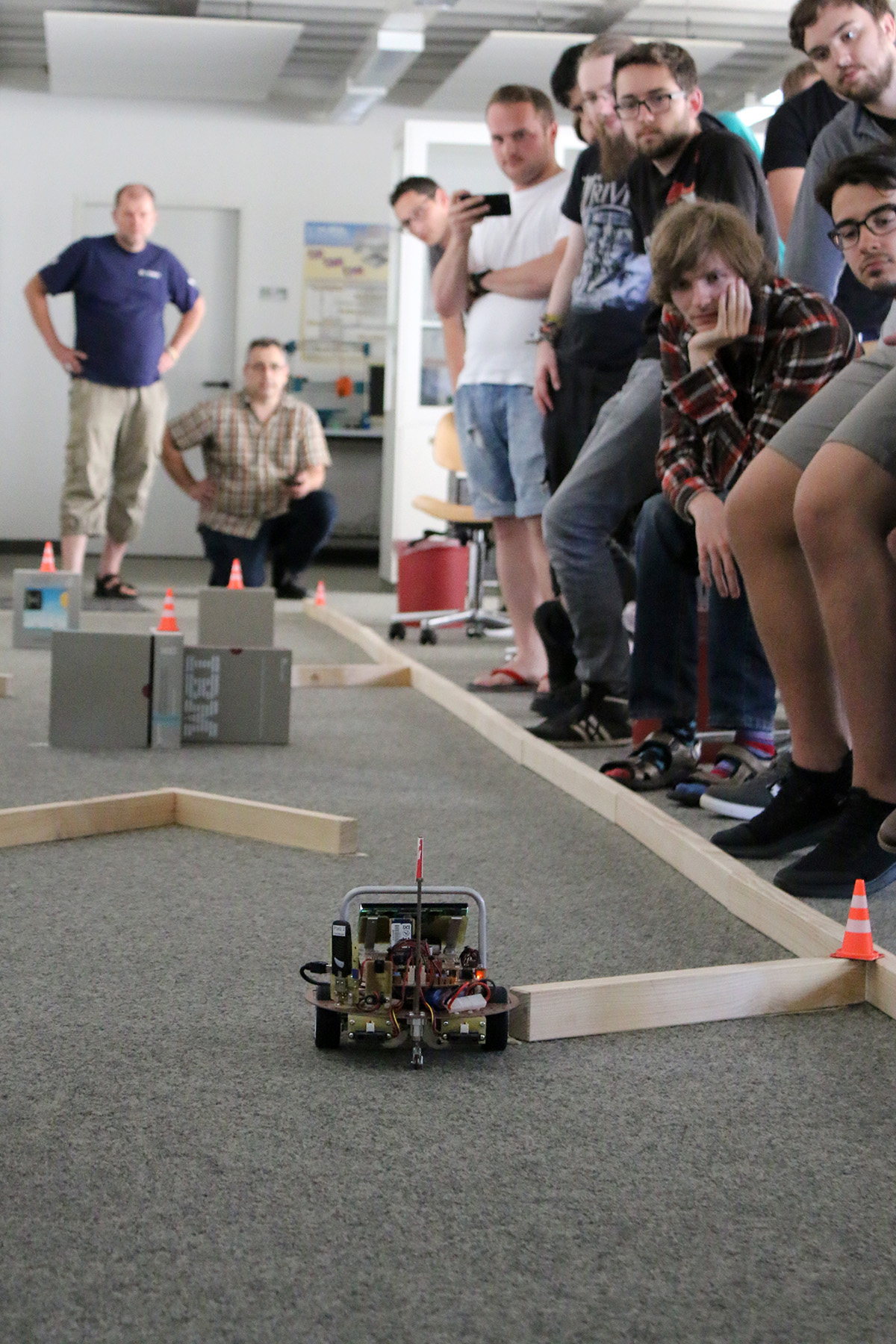
Eine Gruppe von Menschen an der Hochschule Coburg beobachtet, wie ein kleiner Roboter einen von Holzbarrieren und orangefarbenen Pylonen umgebenen Parcours befährt. Einige sitzen, andere stehen und alle beobachten die Bewegungen des Roboters mit großem Interesse. Die Kulisse scheint eine Indoor-Veranstaltung oder ein Workshop zu sein.
Eine Gruppe von Menschen an der Hochschule Coburg beobachtet, wie ein kleiner Roboter einen von Holzbarrieren und orangefarbenen Pylonen umgebenen Parcours befährt. Einige sitzen, andere stehen und alle beobachten die Bewegungen des Roboters mit großem Interesse. Die Kulisse scheint eine Indoor-Veranstaltung oder ein Workshop zu sein.
Studierende lassen kleine Roboter gegeneinander antreten. Wer ist schneller, wer kommt sicherer durch die Strecke voller Hindernisse. Das macht nicht nur Spaß, die angehenden Elektroingenieure und Informatiker lernen dabei, worauf es später auch beim Bau autonomer Fahrzeuge ankommt.
Julian Koch, Christopher Weiglein und Endrit Demaj haben den Schnellsten. Eine Minute, 17 Sekunden und 14 Hundertstelsekunden braucht ihr Roboter bis ins Ziel. Dabei umfährt er zielstrebig fast jedes Hindernis, das sich ihm in den Weg stellt. Holzblöcke, Mülleimer, Verkehrskegel.
Für jede Berührung mit einem Gegenstand würde es Zeitabzug geben: Fünf Sekunden pro Kontakt. Schlimmer wird es nur, wenn man in den Parcours eingreifen muss. Wer seinen Roboter händisch versetzt, weil er sich festgefahren hat, gibt jeweils zehn weitere Sekunden ab. Doch die Taktik der drei Studenten geht auf.
„Das Siegerteam hat mit einer einfachen, aber offenbar zuverlässigen Strategie gearbeitet, die es selbst als Immer Vollgas bezeichnet“, erklärt Prof. Dr. Michael Engel. Andere Gruppen, die wesentlich komplexere Lösungsansätze gewählt haben, sind nicht so gut gefahren. „Wie man sieht, ist auch bei den Ingenieuren nicht immer die aufwendigste Strategie die beste.“
Kreativ waren die Studenten auf jeden Fall. Ein Team hat versucht, die Rennstrecke mithilfe von Ultraschall zu kartographieren. Das nächste setzte darauf, dass sein Roboter die Hindernisse einfach wegschiebt. Der Wettbewerb war Abschluss der Lehrveranstaltung „Embedded Project“ bei Michael Engel. 18 Studenten aus den Studiengängen Automatisierungstechnik und Robotik und Informatik haben daran teilgenommen. Jeweils in Zweier- und Dreierteams haben sie an einem Roboter gearbeitet. Die Hardware war vorgegeben. Die Software mussten die Studenten selbst entwickeln, z.B. um Sensoren, Aktuatoren und das Display anzusteuern und um den Roboter überhaupt lenken zu können. Betreut und unterstützt wurden sie dabei von Laboringenieur Udo Schader.



